Underwater Remotely Operated Vehicle (ROV)
EGR 190: Applied Engineering Design
Objective
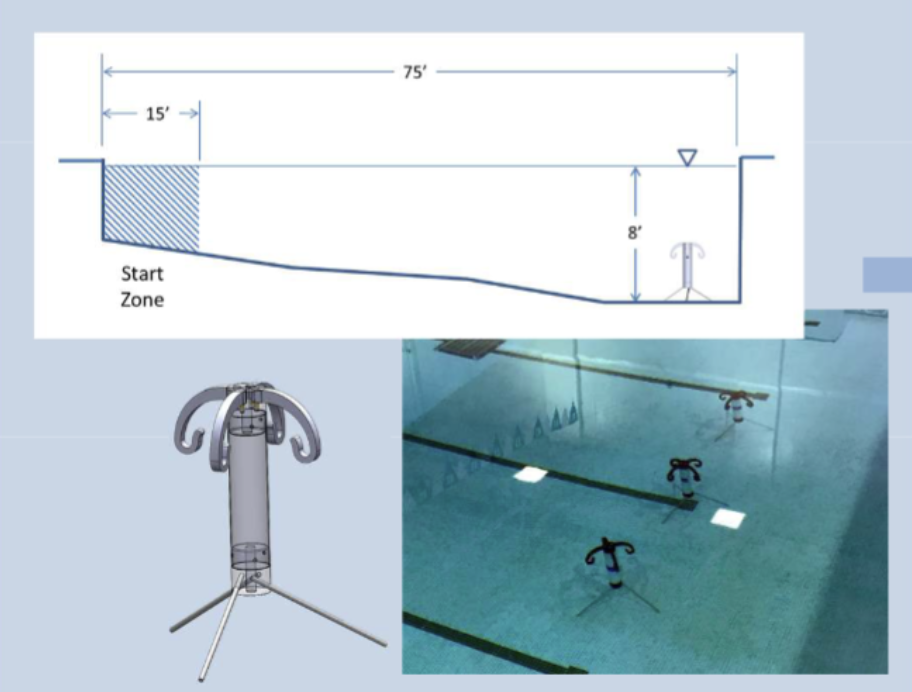
Retrieve three underwater “Treasure Objects” that are placed in random line order on the bottom of the deep end of a pool. Your device must navigate from the shallow to the deep pool sections and retrieve (i.e., by bringing to the surface) the Treasure Objects in a specified sequence. The three Treasure Objects are visually identical, but their cylindrical central tube structure is comprised of three different materials (steel, aluminum, and plastic).
Final ROV
Conclusion
Outcome
Design Breakdown
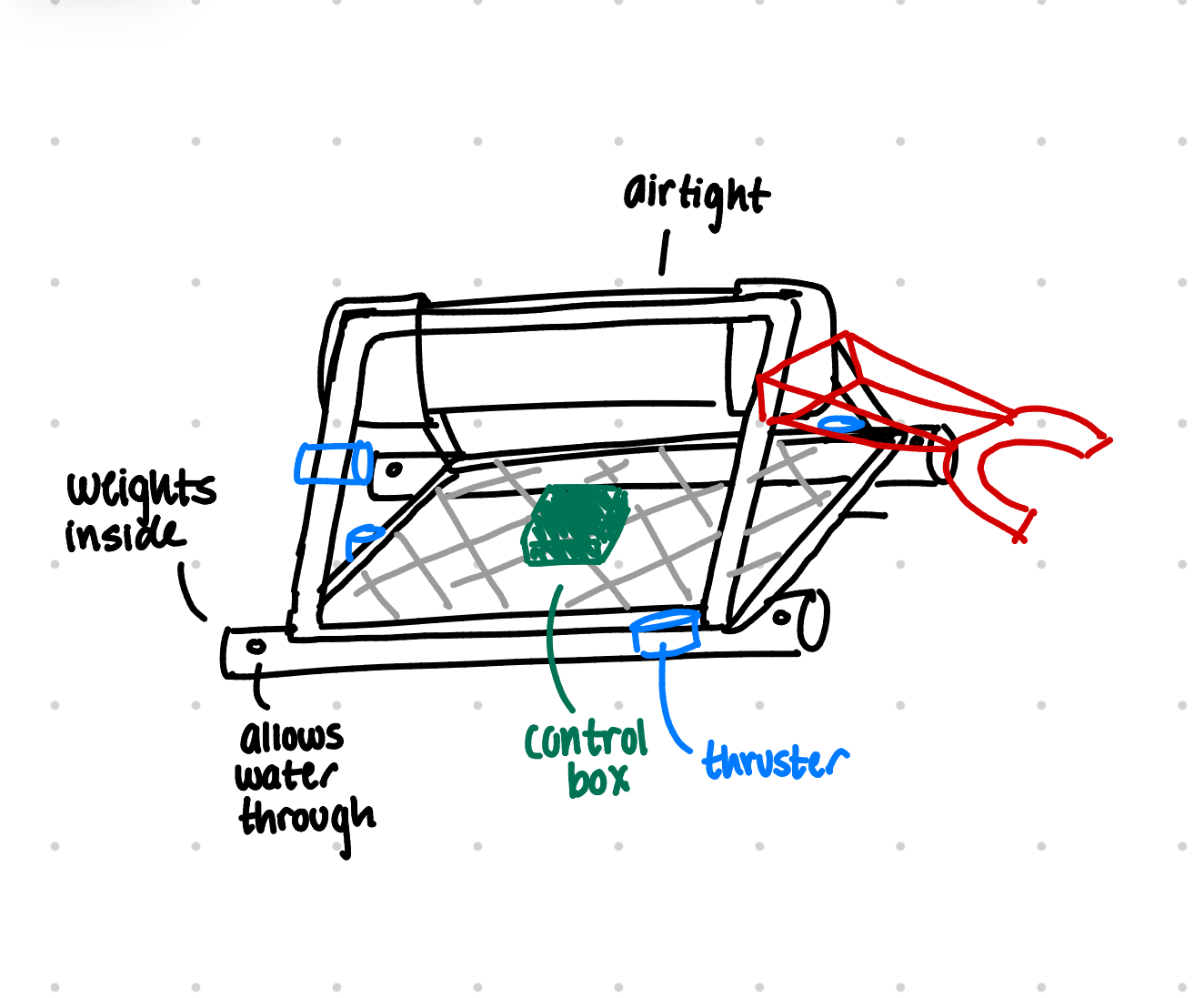
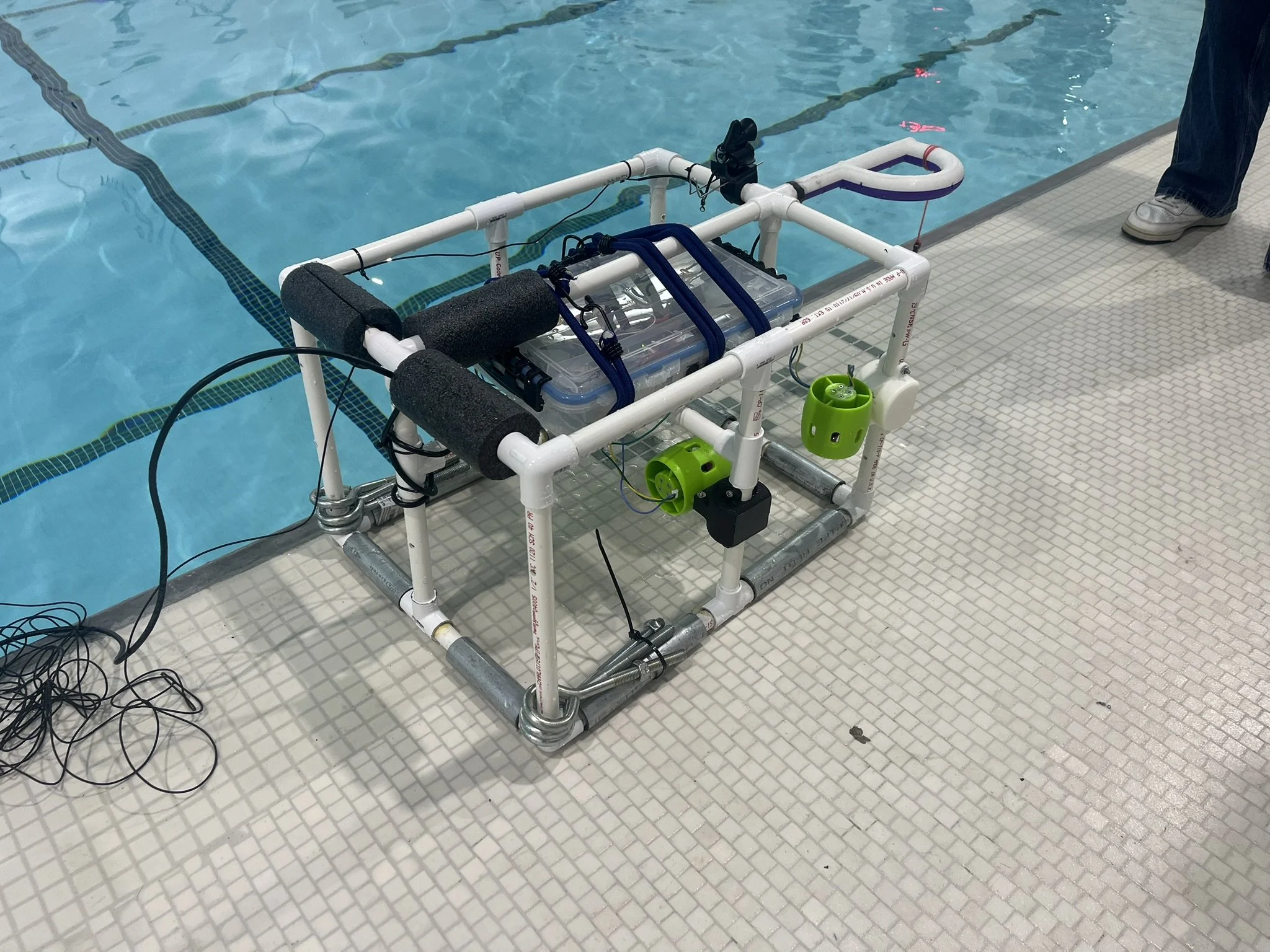
Our group designed an ROV using a PVC frame and custom 3D-printed components that’s capable of navigating along the pool floor to sense and retrieve the Treasure Objects. The vehicle performed reliably during the final evaluation, successfully identifying and recovering all three objects within the first 10 minutes of our allotted hour-long testing window.

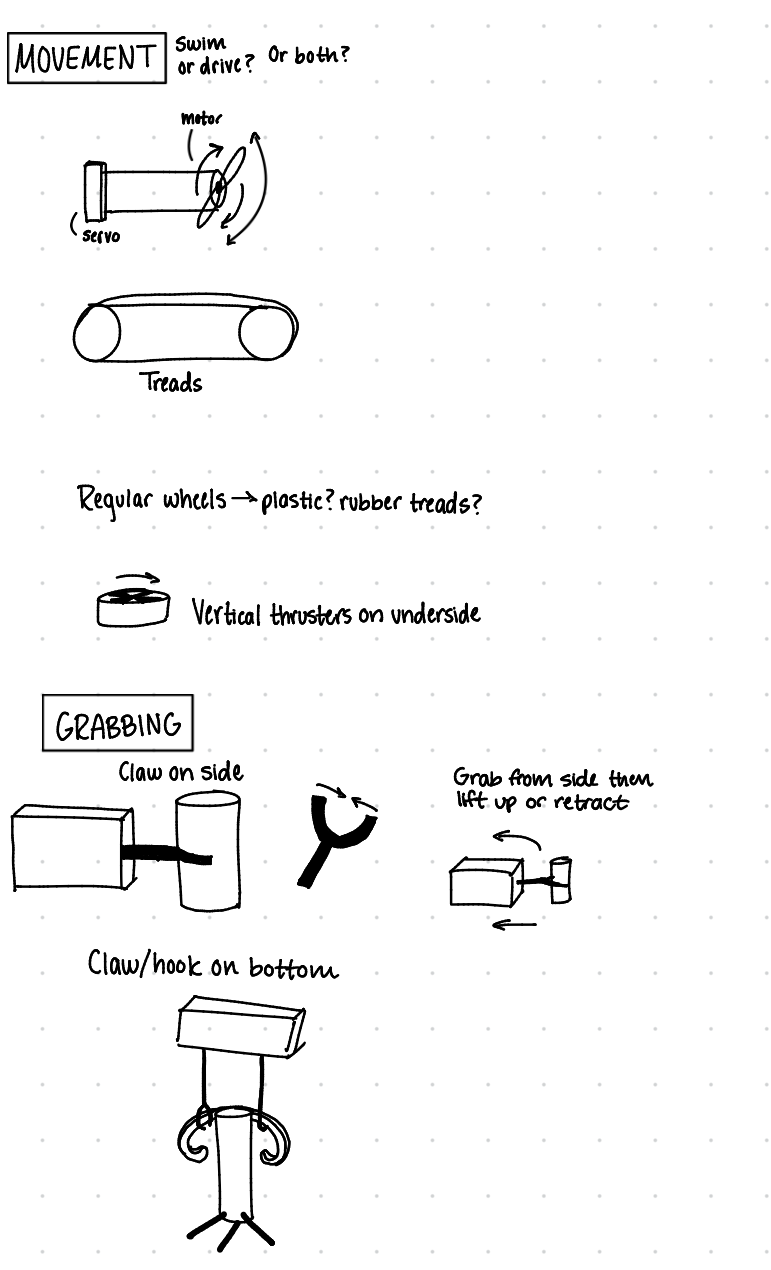
We began by researching similar projects to get an understanding of what solutions currently exist and the different approaches we could take. Ultimately, we decided to build an ROV that swam along the pool floor then established how we were going to accomplish each aspect of the task.
-
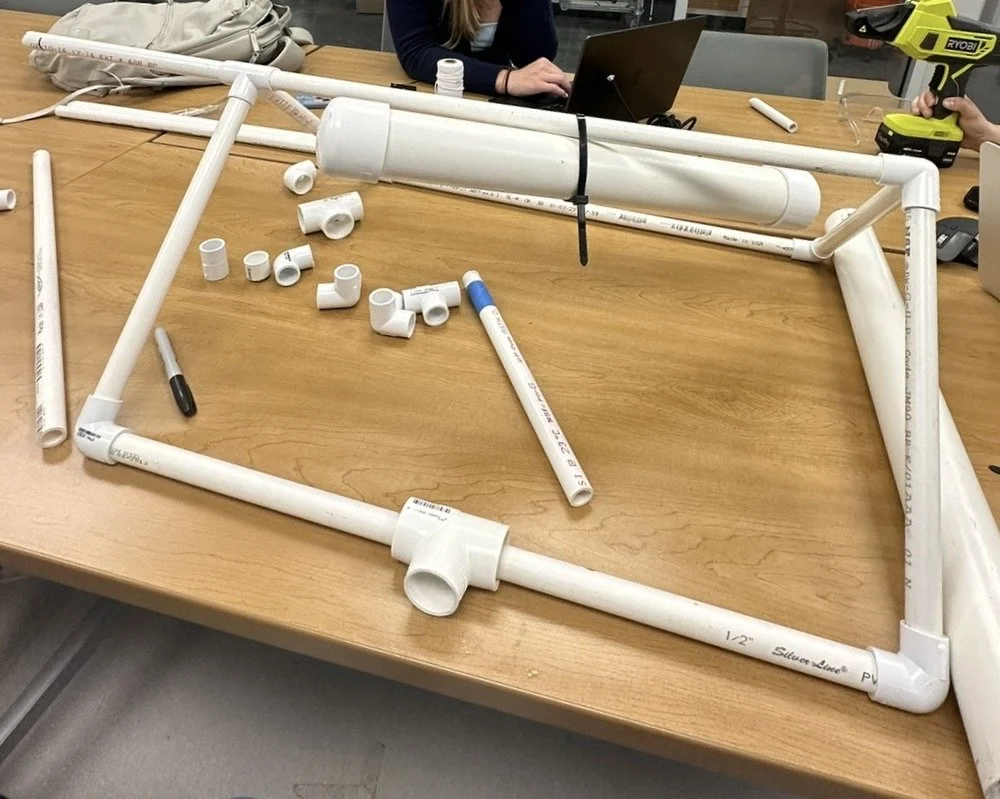
We chose to build our ROV’s frame out of PVC pipe. We had discussed 3D printing a custom frame but ultimately chose PVC because it was low-cost and still gave us the flexibility to create a custom shape without starting completely from scratch.
-
We needed our ROV to sink directly to the bottom of the pool without tilting or tipping. To do so, we flooded our PVC frame by drilling holes on top. Additionally, to prevent tipping, we added weights to the bottom of the frame and pool noodles to the top. The amount of weight added was determined during later tests, with the goal of making the ROV negatively-buoyant, but just enough to reach the bottom of the pool.
-
We used a 4-thruster system to steer the ROV. 2 thrusters, left and right, were used to navigate along the pool floor. The other 2 were used to push the ROV upwards once the Treasure Object was retrieved. We relied entirely on the weight of the ROV itself to reach the bottom of the pool.
-
We used a magnet and inductive sensor to determine the material of each treasure object.
Steel (Ferrous Metal): Magnet sticks & inductive sensor turns on light
Aluminum (Non-Ferrous Metal): Magnet doesn’t stick & inductive sensor turns on light
Plastic (Non-Metal): Magnet doesn’t stick & inductive sensor doesn’t turn on light
-
We designed and 3D printed an arm with a semicircular loop on the end that fit around one of the Treasure Object’s hooks. We discussed a more complex claw mechanism that opened and closed using a servo but ultimately decided that the hoop would be far simpler and more reliable. We printed the arm in two halves and embedded the induction sensor within it.
First Frame Design
Skills
CAD Modeling (SolidWorks)
Iterative Prototyping
Material Selection
Prototype Testing
Project Management
Cross-Functional Collaboration
Early-stage brainstorming
One teammate and I designed and built the frame. Our original idea was a rectangular pyramid design, but after prototyping our idea, we realized that the angles were difficult to work with. Thus, we pivoted to a simpler rectangular prism design.
CAD
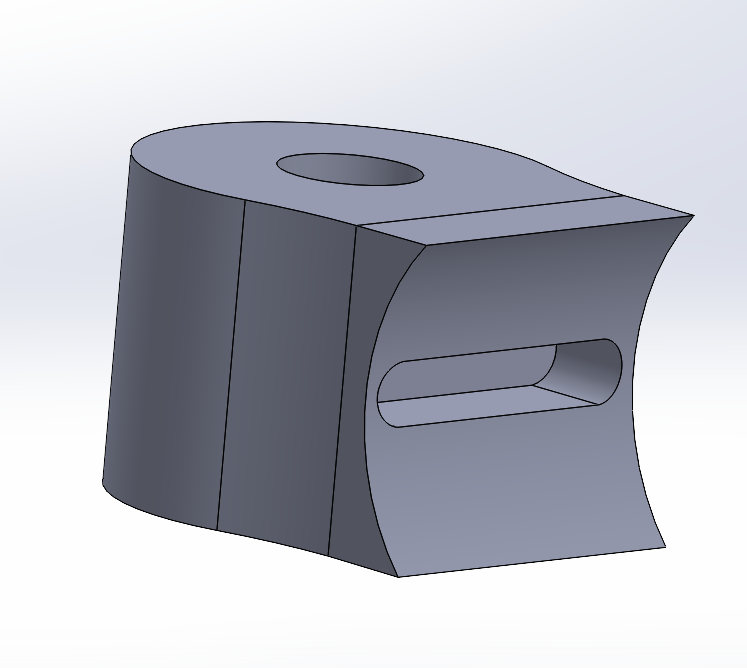
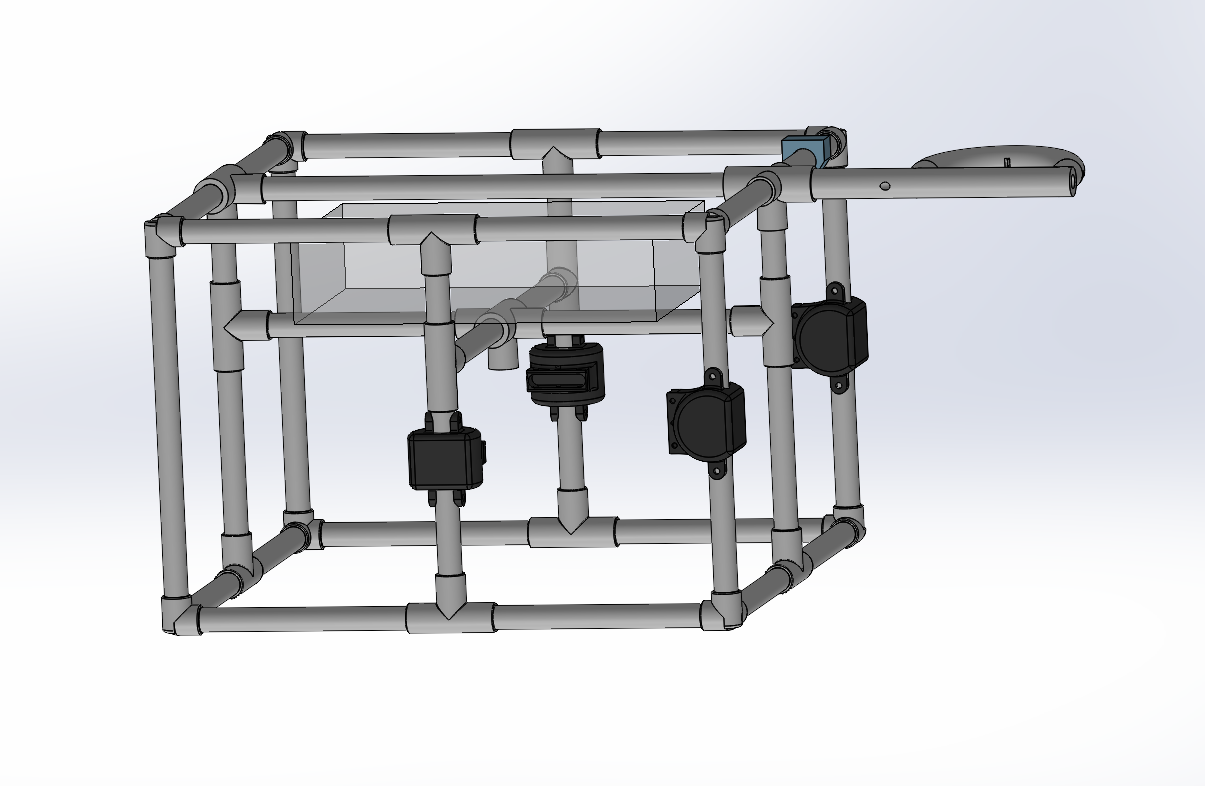
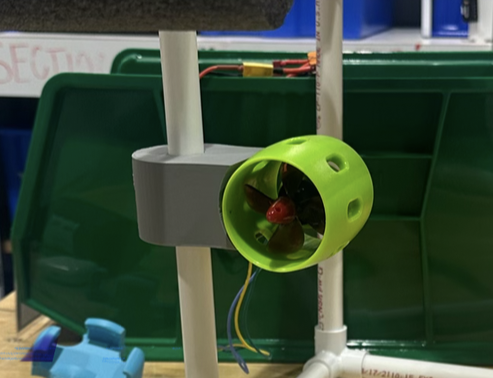
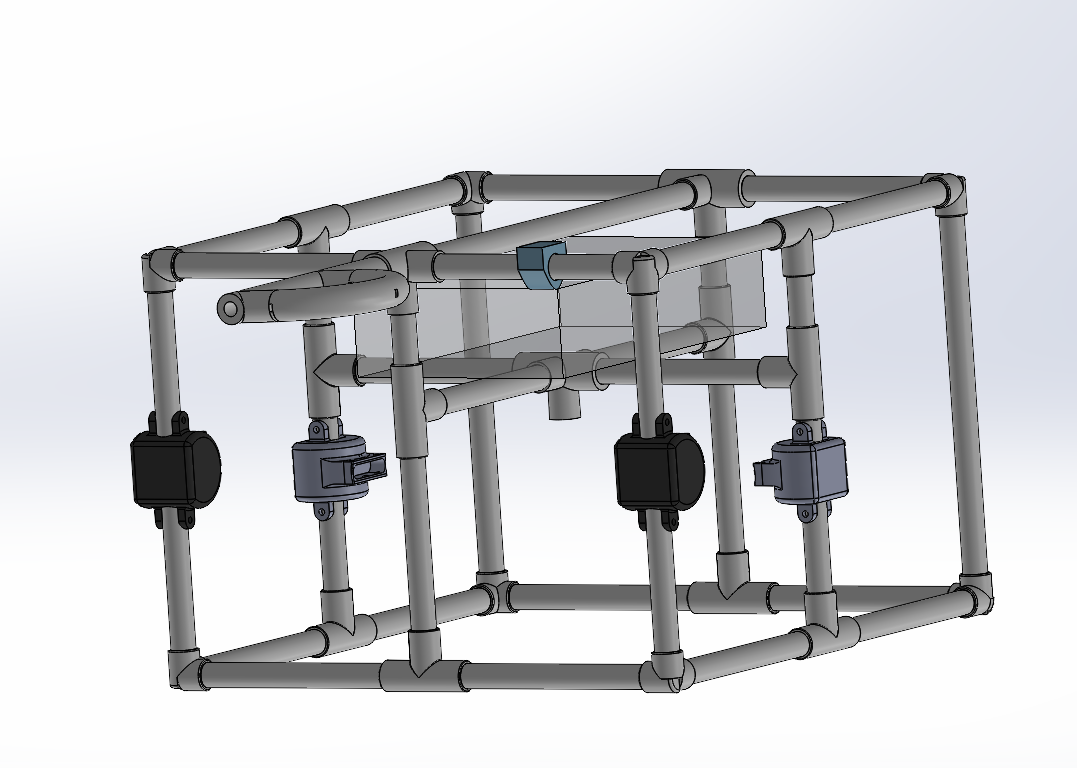
I also designed custom thruster mounts for our horizontal and vertical thrusters and created a comprehensive assembly of the finished ROV.
First Mount Design:
Had to glue thruster into mount and glue mount onto PVC pipe
Thruster didn’t quite fit
Twisted around pipe if enough force applied
Slid up and down pipe
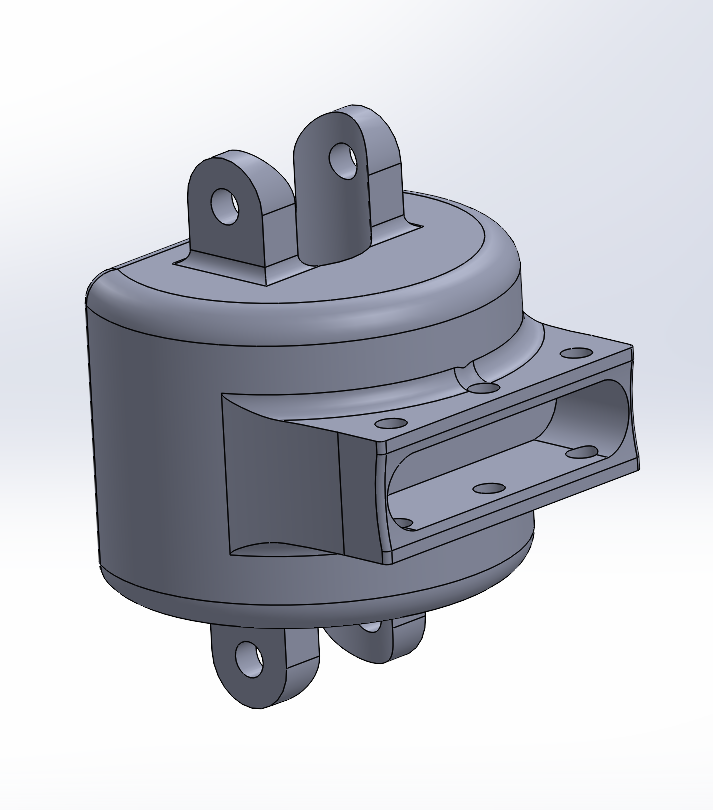
Revised Mount Design:
Screwed into thruster and onto PVC pipe
Deeper cavity allowed for mount to be flush with thruster
Tighter tolerancing so mount wasn’t able to slide or twist

Out of the many class projects I’ve done, this one had the least structure, which I found both exciting and intimidating at first. Conducting thorough background research and breaking the project down into clearly defined tasks catered to each group member’s strengths made it much more manageable. I especially enjoyed working through the unique challenges posed by the underwater environment and seeing all of our individual hard work culminate in a successful, efficient ROV!